For anyone wondering how it works, 95% of the IK logic is in the Animation Graph. Here is the script that takes an impact normal and converts it into a rotation for the foot:
using FlaxEngine;
namespace Game
{
/// <summary>
/// FootIK Script. Can be used to make a character's feet move with uneven ground.
/// </summary>
public class FootIK : Script
{
[Serialize, ShowInEditor, EditorOrder(0), EditorDisplay(name: "Left Foot IK")]
private BoneSocket leftFootIK;
[Serialize, ShowInEditor, EditorOrder(1), EditorDisplay(name: "Right Foot IK")]
private BoneSocket rightFootIK;
[Serialize, ShowInEditor, EditorOrder(2), EditorDisplay(name: "Collision Mask")]
private LayersMask collisionMask;
private AnimGraphParameter _leftFootRot;
private AnimGraphParameter _rightFootRot;
private AnimGraphParameter _leftFootIK;
private AnimGraphParameter _rightFootIK;
public override void OnStart()
{
// Cache parameters
_leftFootRot = Actor.As<AnimatedModel>().GetParameter("LeftFootRot");
_rightFootRot = Actor.As<AnimatedModel>().GetParameter("RightFootRot");
_leftFootIK = Actor.As<AnimatedModel>().GetParameter("LeftFootIK");
_rightFootIK = Actor.As<AnimatedModel>().GetParameter("RightFootIK");
}
public override void OnFixedUpdate()
{
if (Physics.RayCast(new Vector3(leftFootIK.Position.X, Actor.Position.Y + 10, leftFootIK.Position.Z), Vector3.Down, out RayCastHit leftFootHit, 50, collisionMask))
{
// Get a forward-facing direction relative to the ground noraml
Vector3 aimDirection = Vector3.Cross(leftFootHit.Normal, Transform.Right);
// Create a rotation from the direction
Quaternion footRot = Quaternion.LookRotation(aimDirection, leftFootHit.Normal);
_leftFootRot.Value = Quaternion.Euler(footRot.EulerAngles.X, 0, footRot.EulerAngles.Z);
_leftFootIK.Value = leftFootHit.Point.Y - Actor.Position.Y;
}
else
{
_leftFootRot.Value = Quaternion.Euler(0, 0, 0);
_leftFootIK.Value = 0;
}
if (Physics.RayCast(new Vector3(rightFootIK.Position.X, Actor.Position.Y + 10, rightFootIK.Position.Z), Vector3.Down, out RayCastHit rightFootHit, 50, collisionMask))
{
// Get a forward-facing direction relative to the ground noraml
Vector3 aimDirection = Vector3.Cross(rightFootHit.Normal, Transform.Right);
// Create a rotation from the direction
Quaternion footRot = Quaternion.LookRotation(aimDirection, rightFootHit.Normal);
_rightFootRot.Value = Quaternion.Euler(footRot.EulerAngles.X, 0, footRot.EulerAngles.Z);
_rightFootIK.Value = rightFootHit.Point.Y - Actor.Position.Y;
}
else
{
_rightFootRot.Value = Quaternion.Euler(0, 0, 0);
_rightFootIK.Value = 0;
}
}
}
}
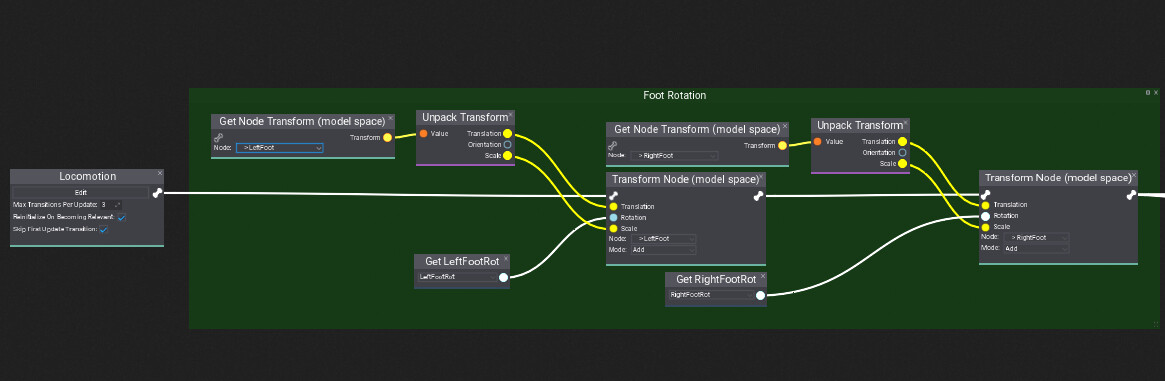
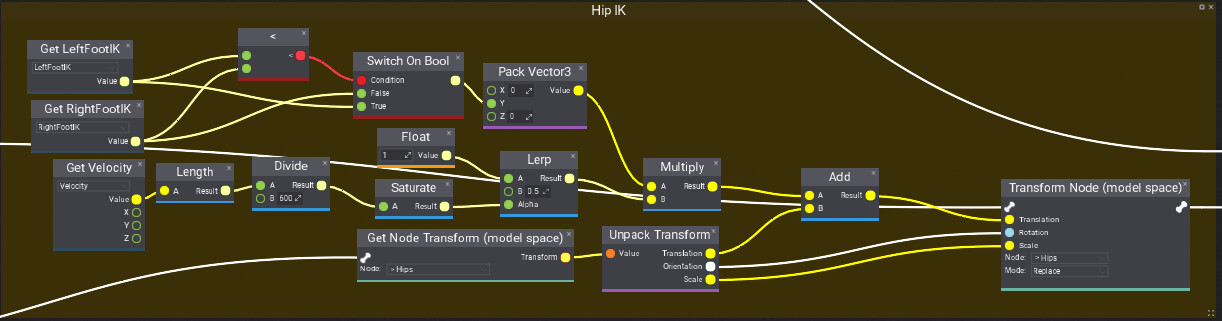
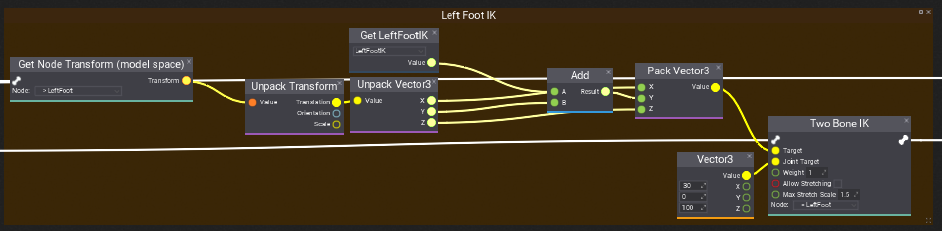
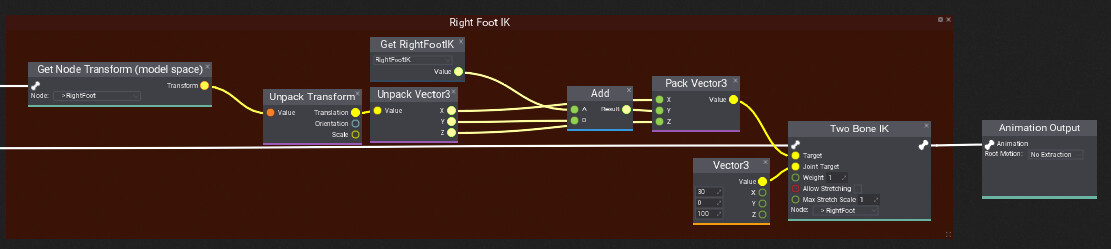
And here are some screenshots of the monstrous Animation Graph:

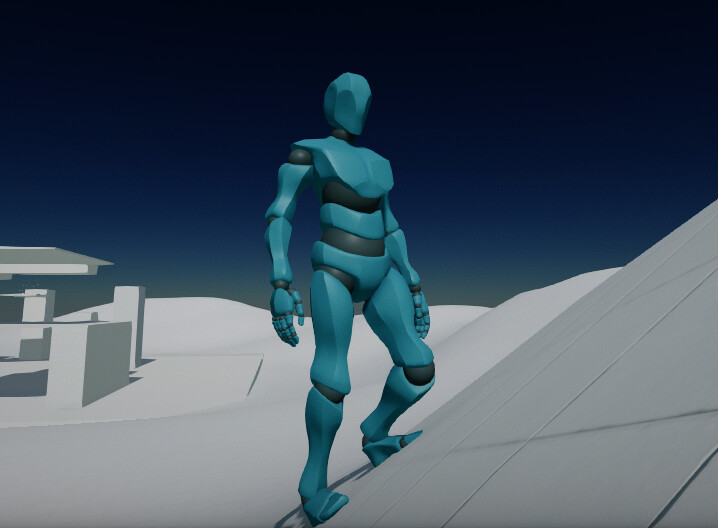
From the testing I’ve done so far, this IK system yields excellent results.