Hello everyone,
I dabbled in volume rendering a little bit and for the most part it is ‘relatively’ simple to make your standard 3d graphics pipeline on top of the existing one.
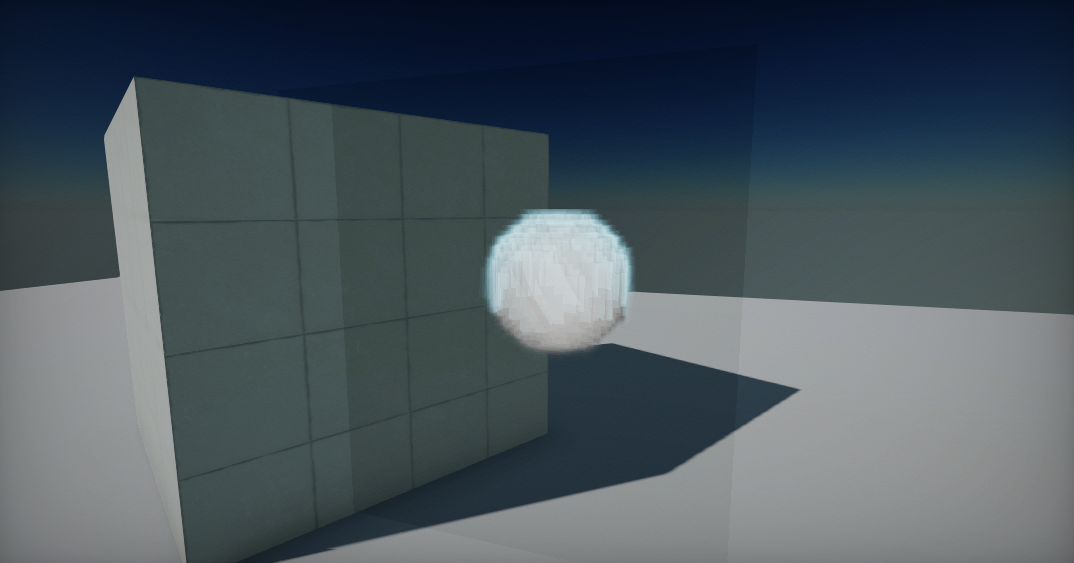
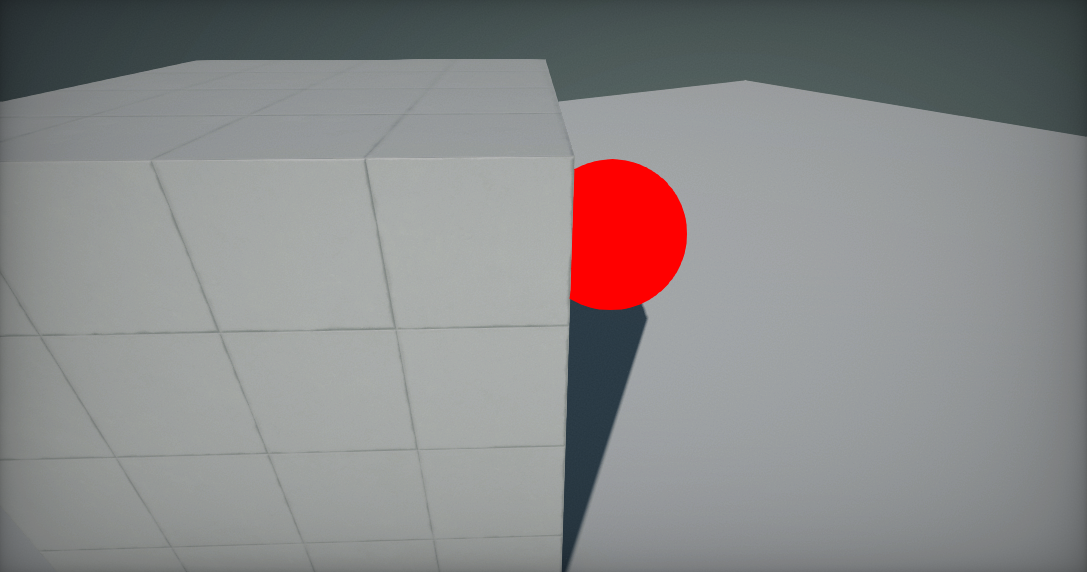
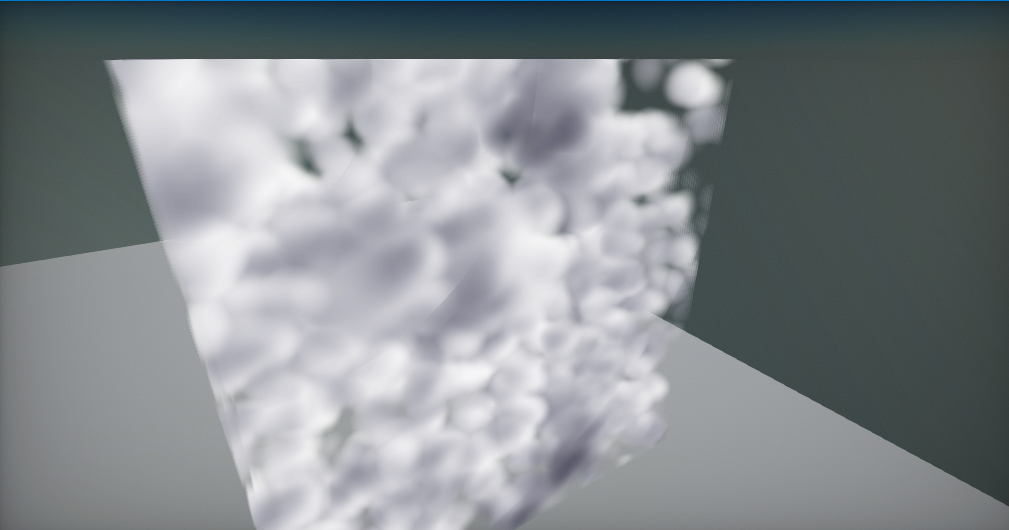
For now my test renderer have a underlying dataset to just visualize density points in space. But the depth-testing gives me real headaches.
I tried the standard opengl depth-testing. But something is off and I guess the clipspace to worldcoordinate calculations are not the way they should be.
Here the code in my pixel shader (I render the volume on the surface of a cube).
META_PS(true, FEATURE_LEVEL_ES2)
float4 PS_Custom(PixelInput input) : SV_Target
{
// Get depthbuffer value at point of model hull
float4 depthBufferValue = DepthBuffer.Sample(MeshTextureSampler, input.Position.xy);
// Adjust to clipspace range [-1,1]
float4 clipSpaceValue = float4(input.Position.xy * 2.0f - 1.0f, depthBufferValue.x * 2.0f - 1.0f, 1.0f);
// From clipspace to normalized world space
float4 homogenousPosition = mul(clipSpaceValue, ViewProjectionMatrixInverse);
// Calc real world position
float4 worldPosition = float4(homogenousPosition.xyz / homogenousPosition.w, 1);
// Translate to local position
float3 localPosition = mul(worldPosition, LocalMatrix).xyz;
float depthLength = length(localPosition - input.CameraLocal);
And this to set up the shader and the matrizes:
var data = new Data();
Matrix.Multiply(ref renderContext.View.View, ref renderContext.View.Projection, out var viewProjection);
Actor.GetLocalToWorldMatrix(out var world);
Matrix.Invert(ref viewProjection, out var viewProjectionInverse);
Matrix.Transpose(ref world, out data.WorldMatrix);
Matrix.Transpose(ref viewProjection, out data.ViewProjectionMatrix);
Matrix.Transpose(ref viewProjectionInverse, out data.ViewProjectionMatrixInverse);
Actor.GetWorldToLocalMatrix(out var local);
Matrix.Transpose(ref local, out data.LocalMatrix);
data.CameraPosition = Cam.Position;
context.BindSR(0, _gpuTextureBuffer);
context.BindSR(1, renderContext.Buffers.DepthBuffer);
Can someone help me with this?
 )
)